


- News
Une équipe de recherche développe un système robotique flexible et intuitif
14.07.2022 Pour les entreprises qui fabriquent des produits en petites quantités et avec de nombreuses variantes, les solutions d’automatisation traditionnelles ne s’avèrent pas rentables. C’est la raison pour laquelle une équipe de recherche de l’Institute for Human Centered Engineering HuCE de la Haute école spécialisée bernoise BFH cherche à développer un système robotique collaboratif, apte à allier l’efficacité de l’automatisation à la flexibilité humaine.
Les robots sont devenus indispensables dans les ateliers de production et de montage. Mais pour de nombreuses entreprises, une solution d’automatisation installée à demeure ne se révèle pas économiquement viable, en particulier lorsque la diversité des produits est grande, alors que la taille des lots est réduite. De plus, un système doit pouvoir être adapté rapidement à de nouvelles tâches en fonction des besoins de production et être suffisamment flexible pour permettre l’intégration de nouveaux produits. Afin de pouvoir développer des solutions d’automatisation flexibles ad hoc, l’équipe de recherche de l’Institute for Human Centered Engineering HuCE de la Haute école spécialisée bernoise BFH travaille en collaboration avec un partenaire économique sur un système robotique collaboratif qui doit être flexible, facile à adapter et intuitif dans son utilisation.
Interface entre l’être humain et la machine
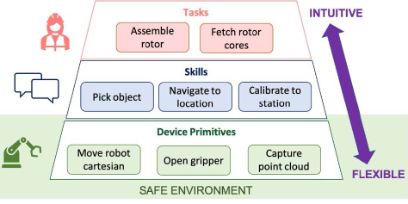
Le système à développer dans le cadre du projet de recherche AgileRobotics, soutenu par Innosuisse, doit combiner l’efficacité de l’automatisation et la flexibilité humaine. Cela requiert une interface intelligente entre l’homme et la machine, qui permette de traduire les objectifs définis par l’homme en actions concrètes du robot. L’interface se compose d’une architecture à trois couches: Tasks, Skills et Device Primitives (voir illustration). Les Tasks correspondent au langage naturel, les Device Primitives aux capacités de la machine. Les Skills sont orientés objet et servent de pont de communication. De nouvelles tâches sont créées en combinant des compétences. De nouvelles compétences sont créées en combinant des Device Primitives. Le robot peut ainsi être adapté à de nouvelles tâches, même si l’on ne dispose pas de connaissances en programmation. Pour l’interface homme-machine, les scientifiques suivent une approche de design thinking: elle est développée en collaboration avec le personnel et testée par lui en permanence. En effet, on considère un faible degré d’acceptation de la technologie comme l’une des principales causes d’échec de l’introduction de systèmes cobotiques. En revanche, réussir à mettre en œuvre un tel système peut contribuer à ce que le personnel développe ses capacités, acquière de nouvelles compétences et diversifie ses activités. De cette façon la participation active des collaborateurs et collaboratrices au développement et à l’amélioration constante du système robotique renforce le capital humain de l’entreprise et contribue à accroitre la motivation, la qualité et l’efficacité.
Le groupe de recherche de Sarah Dégallier Rochat, du Laboratoire de perception informatique et réalité virtuelle, s’est déjà spécialisé dans le développement d’interfaces homme-machine plus intuitives dans le cadre de plusieurs projets. Le projet AgileRobotics s’appuiera notamment sur les résultats du projet en cours Cobotics, digital skills and the re-humanization of the workspace du programme FNS «FNP77 – Transformation numérique».



