- News
Contrôle de positionnement hautement dynamique d’un actionneur piézoélectrique
09.02.2024 Dans le cadre de son travail de diplôme, Oliver Hess a analysé un actionneur piézoélectrique à ultrasons hautement dynamique de Miniswys SA et testé divers algorithmes de contrôle de positionnement.
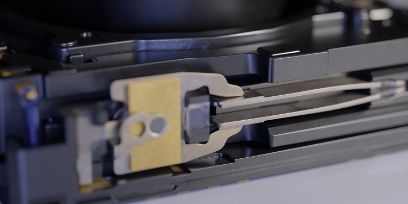
Les actionneurs piézoélectriques à ultrasons sont des micro-actionneurs qui utilisent l’effet piézoélectrique réciproque pour générer un mouvement. Les actionneurs à ultrasons UCM de Miniswys sont utilisés pour des applications où des changements de position rapides et précis doivent être mis en œuvre dans un volume réduit et de manière efficiente sur le plan énergétique, par exemple pour la stabilisation de caméras de smartphone ou sur des micropompes utilisés dans l’industrie médicale. Les propriétés non linéaires des UCM compliquent la modélisation et doivent être compensées en vue d’un positionnement précis.
Dans son travail de fin d’études, Oliver Hess, diplômé de la filière BSc en Mécatronique et technique des systèmes (anciennement Microtechnique et technique médicale), devait procéder à l’identification de système d’un UCM et concevoir et tester différents algorithmes de contrôle sur la base d’un modèle linéarisé. Sur un dispositif d’essais, il a testé un régulateur PD et en cascade et optimisé la précision et la vitesse de positionnement. Il a démontré avec succès que ses régulateurs satisfaisaient aux critères de précision et de vitesse de Miniswys et que le système pouvait compenser les non-linéarités en boucle fermée.