Système robotique agile pour une production hautement diversifiée en petits lots
Les systèmes d’automatisation traditionnels ne sont pas rentables lorsqu’il s’agit de produire de nombreuses variantes d’une pièce en petits lots. Le projet veut mettre au point un système d’automatisation à la fois flexible et intuitif.
Fiche signalétique
- Départements participants Technique et informatique
- Institut(s) Institute for Human Centered Engineering (HUCE)
- Unité(s) de recherche HUCE / Laboratoire de perception informatique et réalité virtuelle
- Champ thématique stratégique Champ thématique "Transformation numérique centrée sur l'humain"
- Organisation d'encouragement Innosuisse
- Durée (prévue) 01.04.2022 - 30.10.2024
- Direction du projet Prof. Dr. Sarah Dégallier Rochat
- Mots-clés Collaborative robotics; automation; agile robotics
Situation
En Suisse, le travail manuel jouit encore d’une grande popularité. Pourtant, l’automatisation de ces tâches permettrait souvent de réduire les couts de production et d’aligner les prix sur ceux de la concurrence. Bien que, sur le plan technique, il soit possible de recourir à des solutions d’automatisation fixes traditionnelles, celles-ci ne sont pas rentables pour les tâches d’assemblage dès que la production concerne des pièces fabriquées en petits lots, présentant une grande diversité et requérant une qualité élevée. Dans un tel contexte, le système d’automatisation doit en outre pouvoir exécuter rapidement de nouvelles tâches en fonction des besoins de production et se montrer suffisamment flexible pour pouvoir y intégrer de nouveaux produits. Plutôt que de s’appuyer sur des solutions de pointe traditionnelles nécessitant une expertise externe, l’entreprise associée au projet de recherche entend développer son savoir-faire interne afin d’être en mesure de mettre au point des solutions d’automatisation ponctuelles flexibles.
Approche
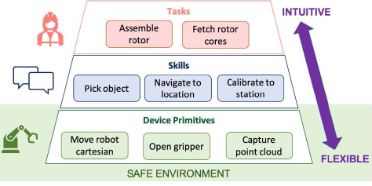
En vue de disposer d’une solution d’automatisation qui présente la même flexibilité que le travail manuel, un nouveau système de production doit être développé. Ce cas nécessite une interface humain-machine (IHM) intelligente qui permet aux travailleurs d’utiliser efficacement l’environnement cobotique en fonction de leurs besoins. Comme les travailleurs et travailleuses ne sont pas expert-e-s en robotique, le système doit être intelligent : il doit être capable de traduire des objectifs définis par l’être humain en trajectoires robotiques. Pour y parvenir, l’équipe de recherche mise sur un jumeau numérique de l’espace de travail. Le jumeau numérique est généré en temps réel par l’intégration d’informations sensorielles et d’informations préalables (fichiers CAO, descriptions de processus, etc.). Un indice de probabilité est associé aux différents objets reconnus et la technologie de perception active est utilisée pour améliorer les performances. Par le biais d’une interface, l’utilisateur ou l’utilisatrice a la possibilité d’ajouter de nouveaux objets et de définir les paramètres d’un ensemble d’algorithmes prédéfinis pour la reconnaissance et la localisation d’objets. Pour garantir à la fois la flexibilité et l’intuitivité du système, l’IHM repose sur une architecture à trois couches apte à programmer de nouvelles tâches sans codage tout en créant automatiquement l’interface intuitive de commande correspondante.