Kollaboratives Roboter-System für grosse Produktevielfalt bei kleinen Losgrössen
Für die Produktion kleiner Mengen mit grosser Produktevielfalt ist traditionelle Automatisierung nicht rentabel. Das Projektziel ist die Entwicklung eines intuitiven, flexiblen Automatisierungssystems für eigene Lösungen in Unternehmen.
Steckbrief
- Beteiligte Departemente Technik und Informatik
- Institut(e) Institute for Human Centered Engineering (HuCE)
- Forschungseinheit(en) HuCE / Labor für Computerwahrnehmung und virtuelle Realität
- Strategisches Themenfeld Themenfeld Humane Digitale Transformation
- Förderorganisation Innosuisse
- Laufzeit (geplant) 01.04.2022 - 30.10.2024
- Projektleitung Prof. Dr. Sarah Dégallier Rochat
- Schlüsselwörter Kollaborative Roboter; Automation; agile robotics
Ausgangslage
In der Schweiz werden immer noch viele Arbeiten von Hand ausgeführt. Die Automatisierung dieser Aufgaben würde die Produktionskosten senken und die Preise denjenigen der Konkurrenz angleichen. Doch für viele Firmen ist eine traditionelle, fest installierte Automatisierungslösung für Montagearbeiten wirtschaftlich nicht sinnvoll, auch wenn sie technisch möglich wäre, insbesondere dann, wenn die Produktevielfalt gross ist, die Losgrössen aber klein und die Qualitätsanforderungen hoch. Zudem muss das System je nach Produktionsbedarf schnell auf neue Aufgaben umgestellt werden können und flexibel genug sein, um die Integration neuer Produkte zu ermöglichen. Statt auf diese traditionellen High-End-Lösungen zu setzen, die externe Expertise benötigen, strebt das in das Forschungsprojekt eingebundene Unternehmen an, internes Know-how aufzubauen, um ad hoc flexible Automatisierungslösungen entwickeln zu können.
Vorgehen
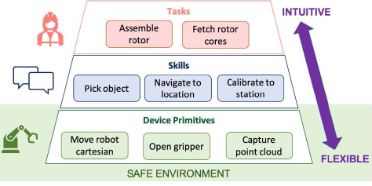
Für die Bewahrung der menschlichen Flexibilität in der Automatisierungslösung braucht es eine intelligente Mensch-Maschine-Schnittstelle, über die die Arbeitnehmenden die Cobotic-Lösung nach ihren Bedürfnissen anwenden und die Produktivität steigern können. Da die Arbeitnehmenden keine Robotik-Fachleute sind, muss das intelligente System vom Menschen definierte Ziele in konkrete Handlungen des Roboters übersetzen können. Zu diesem Zweck schlagen die Forschenden vor, eine digitale Kopie des Arbeitsbereichs zu erstellen. Da das Roboter-System flexibel sein muss, ist der Arbeitsbereich nicht bekannt und muss anhand sensorischer Informationen und A-priori-Wissen online nachgebildet werden. Die digitale Kopie wird in Echtzeit generiert, basierend auf sensorischen (Kameras und Lidar) und im Voraus bekannten Informationen (z. B. CAD-Dateien, Prozessbeschreibungen usw.). Den erkannten Objekten wird eine Wahrscheinlichkeit zugeordnet und durch aktive Wahrnehmung die Leistung verbessert. Eine Schnittstelle ermöglicht es den Nutzenden, neue Objekte hinzuzufügen und die Parameter einer Reihe vordefinierter Algorithmen für die Objekterkennung und -lokalisierung festzulegen. Für gleichzeitige Flexibilität und Intuitivität besteht die Schnittstelle aus einer dreischichtigen Architektur. Damit kann der Roboter auch ohne Programmierkenntnisse auf neue Aufgaben eingestellt und gleichzeitig automatisch die dazugehörige intuitive Schnittstelle für die Nutzende geschaffen werden.