Agile robotic system for high-mix low-volume production
Traditional automation is not profitable for high-mix low-volume production. The project’s goal is to develop an intuitive yet flexible automation system that allows companies to develop their own automation solutions in a profitable way.
Factsheet
- Schools involved School of Engineering and Computer Science
- Institute(s) Institute for Human Centered Engineering (HUCE)
- Research unit(s) HUCE / Laboratory for Computer Perception and Virtual Reality
- Strategic thematic field Thematic field "Humane Digital Transformation"
- Funding organisation Innosuisse
- Duration (planned) 01.04.2022 - 30.10.2024
- Head of project Prof. Dr. Sarah Dégallier Rochat
- Keywords Collaborative robotics; automation; agile robotics
Situation
In Switzerland, a lot of work is still done manually. Automating these tasks would often decrease production costs and align prices with the competition. However, although technically possible, traditional, fixed automation solutions for assembly tasks are not economically viable for companies with a high-mix low-volume production, meaning: the lot sizes are small, with a large product diversity and high-quality requirements. In addition, the system needs to be rapidly reallocated to new tasks according to the production needs and to be flexible enough to allow for the integration of new products. Instead of relying on these traditional, high-end solutions requiring external expertise, the company involved in the research project therefore wishes to develop their internal know-how in order to be able to develop ad-hoc, flexible automation solutions.
Course of action
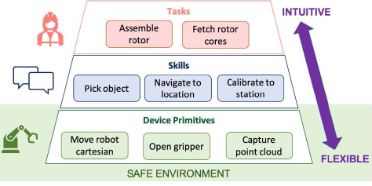
To keep the flexibility of manual work in the automation solution, a production system needs to be developed, that is, in this case, a smart human-machine interface (HMI) that enables workers to efficiently use the cobotic solution according to his/her needs to improve productivity. Since the worker is no robotic expert, the system needs to be smart: it needs to be able to translate human-defined goals into actual robotic trajectories. To achieve this, the researchers propose to develop a digital twin of the workspace. Since the robotic system needs to be flexible, the workspace is unknown and needs to be modeled online according to sensory information and a priori knowledge. The digital twin is generated in real-time based on the fusion of sensory information (cameras and lidar) and a priori information (e.g., CAD files, process descriptions, etc.). A probability is associated with the different recognized objects and active perception is used to improve performance. An interface allows the user to add new objects and to define the parameters of a set of pre-defined algorithms for object recognition and localization. In order to simultaneously address the question of flexibility and intuitiveness, the HMI is based on a three-layer architecture. The architecture allows to program new tasks without coding, but also automatically creates the associated intuitive interface for operators.